{kind=link}
Abel Karimi and Charlotte Dorn stand huddled over a laptop, poring over the data streaming in from the toy-sized vehicle sitting next to them. An error pops up over and over somewhere in its circuitry, triggering its emergency brake system and preventing the car from moving forward for more than a few seconds.
The team isn’t sure whether it’s a short in the wiring or something wrong with the car’s wireless receivers, but they are determined to find the cause. Sometimes working with a car that can drive itself can seem like magic. Other times it can feel like a nuisance with a mind of its own.
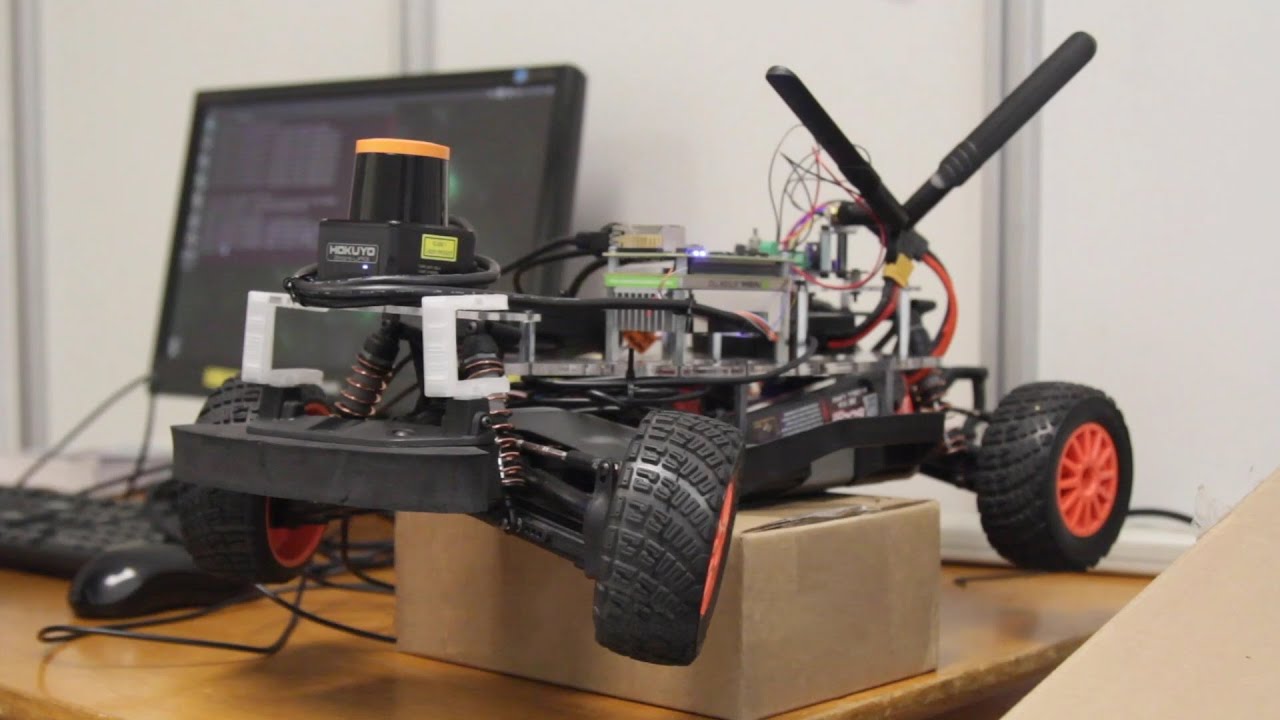
On its surface, the team’s creation resembles a remote-controlled car with a small body and big, soft tires. It has been modified with custom parts, including a laser sensor that functions as the car’s “eyes” and allows it to drive itself around a track with the data it collects. These data are a series of distances gathered by a light detection and ranging sensor, or LiDAR, fed into an algorithm to tell the car if it is heading toward an obstacle and must turn.
UNC computer scientist Parasara Sridhar Duggirala oversees Dorn, a sophomore, and Karimi, a graduate student, in the autonomous vehicle lab. He acknowledges that there is a lot of hype surrounding self-driving cars. “The hype being that ‘oh, it’s going to come in three years or four years.’ The truth is, designing autonomous vehicles is a hard problem,” Duggirala says. “If you want some sort of safe autonomous vehicle, it is going to take time.”
For modified R/C cars navigating a track made out of cardboard walls, the stakes are low and the problems encountered by the algorithms are simpler, but as Duggirala points out, “when you think of deploying it in a mass scale, the game is completely different.”
The average American drives a little over 13,000 miles a year according to the US Department of Transportation. In 2014, Americans drove a total of 3.04 trillion miles — or half a light-year.
In the future, more of that total driving distance is expected to be covered by self-driving cars, Duggirala says. Even if the self-driving car makes one mistake every billion miles, though, that still amounts to 3,040 mistakes every year.
This risk factor is one of the major reasons why a nationwide rollout of the technology hasn’t come sooner.
That’s not to say that running autonomous vehicles at this scale is without its benefits. “Through the process of researching how to drive these small cars, you learn about how the real cars — [from] companies like Tesla — are operating in real-time,” Dorn says. “Even though a lot of it is small scale, you can kind of get a bigger picture.”
In 2019, the UNC computer science team behind these autonomous vehicles, which included Dorn and Karimi as well as fellow car designers Nathan Otterness and Tanya Amert, participated in an automated vehicle racing competition in Montreal. Titled F1Tenth, the competition is an annual event started by the University of Pennsylvania that brings together 1/10th scale cars from computer science programs around the world to compete against one another seeing who has the best build and the best code.
“We put it on the track for the first time and immediately it just rushed all the other teams and it was much to our surprise. We hadn’t tested it that thoroughly, so I think those first few laps when we realized how well it was doing was really an amazing experience,” Dorn says.
The competition is all in good fun and involves plenty of conversation with other schools to gain insights into problem-solving and development. After the races ended, teams shared the code which ran each car on an open-source platform so they could see where their programming differed.
Because of the program’s success, Duggirala envisions a platoon of autonomous vehicles based on their current designs. The team has built three of the F1Tenth cars and plans to build two more prototypes from the University of Washington. The goal will be to have the cars communicate with each other and travel as a unit.
Beyond that, he says, they can scale up the project and bring the algorithms to full-scale electric vehicles that can drive around campus. Universities with engineering programs like those at MIT and Stanford already offer full scale autonomous vehicles with which graduate students and researchers can test their ideas.
For miniature autonomous vehicles like those built by Duggirala’s team, the LiDAR scanners the cars use to “see” are only getting cheaper, which means more schools should soon be able to join UNC among the handful of schools nationwide with similar programs.
“I had done some robotics before but not in a research environment, Dorn says. “Being introduced to this lab and being able to do these hands-on components is just honestly what I love to do.”